PORTABLE 3D SCANNER
작업 효율성을 최대화시키는 고정밀 휴대용 3D 스캐너를 소개해 드립니다.
VXscan-R
.jpg)
디지털 트윈 환경 소프트웨어 모듈 : VXscan-R
자동화된 3D 스캐닝을 위한 가장 직관적인 프로그래밍 및 수집 플랫폼으로 누구나 자동화된 품질 관리 가능!
VXscan-R™은 3D스캐닝 또는 로봇 공학의 비전문가라도 최단 시간에 최적의 치수 측정을 수행할 수 있도록 해주는 오프라인 프로그래밍 소프트웨어입니다. 소프트웨어에 포함된 인텔리전스와 전용 기능을 사용하면 로봇 경로를 프로그래밍하고 가시선과 스캐닝 속도를 최적화하는 작업이 간편해지고 품질 관리 솔루션이 간단해집니다.
VXscan-R™은 보다 효율적인 로봇 셀 관리를 위한 핵심으로, 프로그래밍 및 보안 문제를 해결하고 비전문가도 로봇 시스템으로 작업할 때 자신감을 가질 수 있도록 도와줍니다. 덕분에 이제 누구나 자동화된 품질관리를 이용하여 보다 현명한 의사 결정을 내리고 우수한 파트 품질을 얻을 수 있습니다. 측정 업무에 배정했던 리소스를 더욱 가치 있는 작업으로 전환할 수 있어 조직 전체의 효율성이 향상됩니다.
.jpg)
VXscan-R
누구나 최적의 작업 환경 가능
- - 비전문가도 이용 가능 : 3D 스캐닝 또는 로봇 공학 경험에 관계없이 누구나 로봇을 프로그래밍하고 조작할 수 있습니다.
- - 디지털 트윈 가능 : 오프라인 프로그래밍 기능 덕분에 셀에 오래 머무르는 것을 방지하는 동시에 프로그램 준비 및 시뮬레이션을 위한 완벽한 환경을 이용할 수 있습니다.
- - 소프트웨어 인텔리전스 : 로봇 경로 계획, 스캔 파라미터 조정 및 스마트 해상도 기능을 완벽하게 통합하여 최적의 스캔 결과와 주기 시간을 실현합니다.
VXscan-R
두 개의 완벽한 모듈
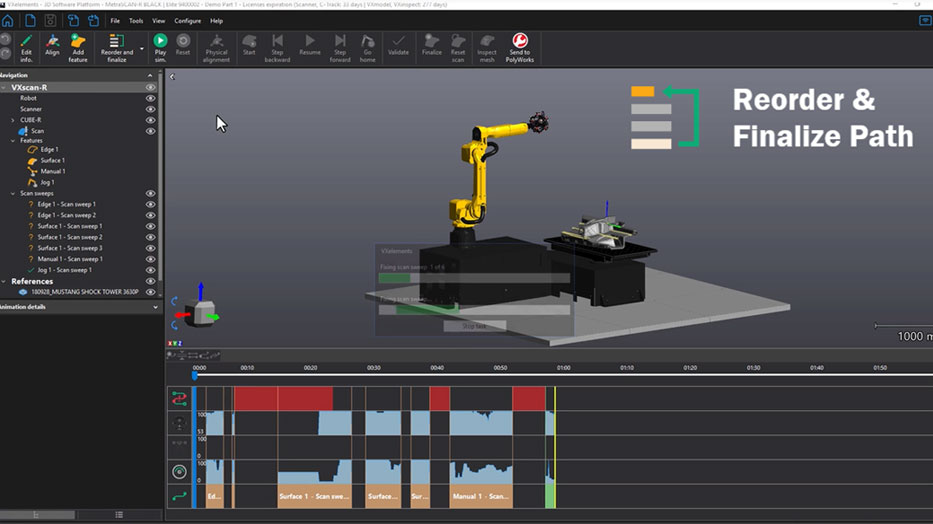
- (1) VXscan-R Plan|프로젝트 준비, 시뮬레이션 및 검증을 위한 완벽한 모듈 자동화 품질 관리 전문가는 CAD 데이터를 가져오고, 스캐닝 파라미터를 구성하고, 로봇 경로를 생성하고, 스캔을 시뮬레이션하고, 시뮬레이션을 계측 소프트웨어로 내보낼 수 있습니다.
- (2) VXscan-R Execute|현장 작업자를 위한 직관적 사용자 인터페이스작업자는 파트 파라미터를 가져오고, 측정 프로그램을 시작하고, 로봇이 홈 위치로 돌아왔을 때 파트를 변경할 수 있습니다.
.jpg)
.jpg)
VXscan-R
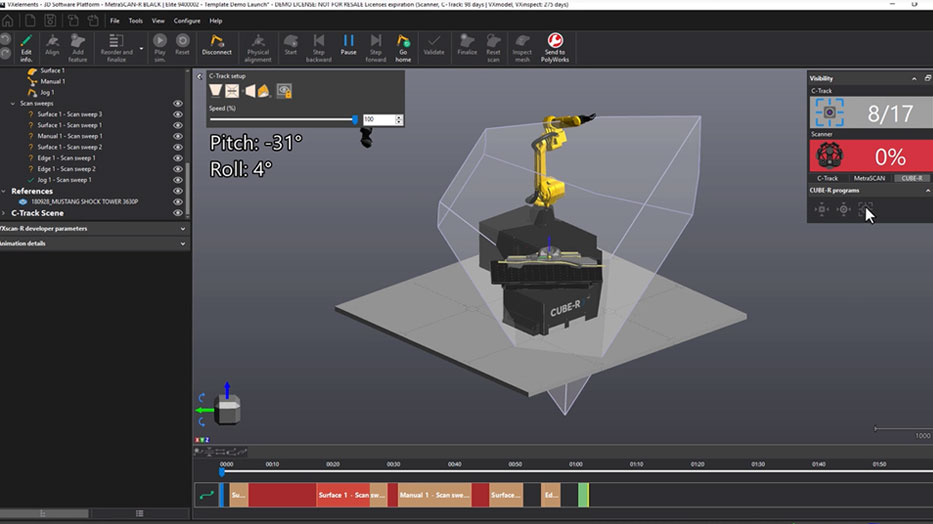
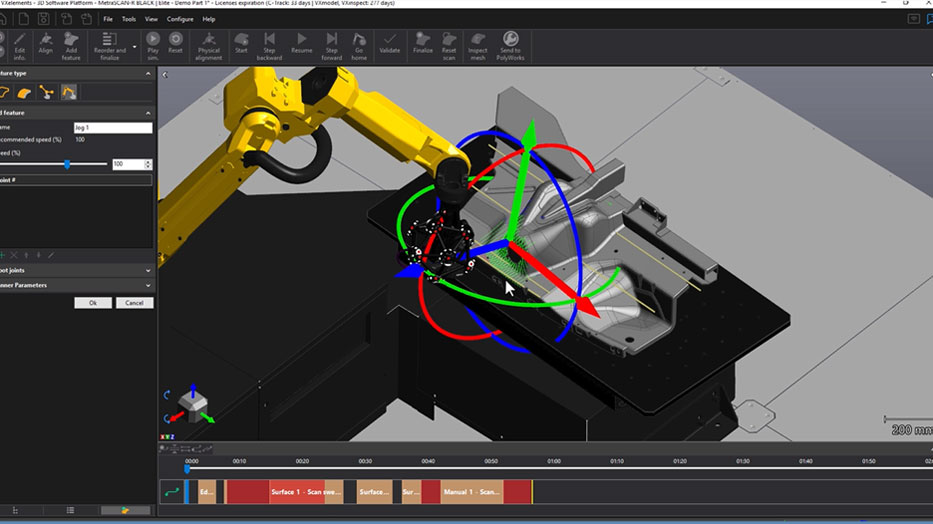
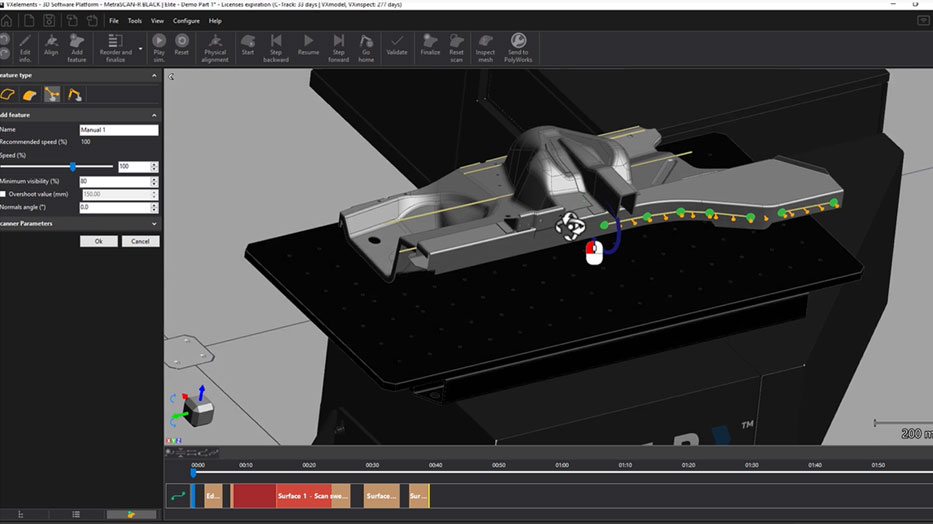
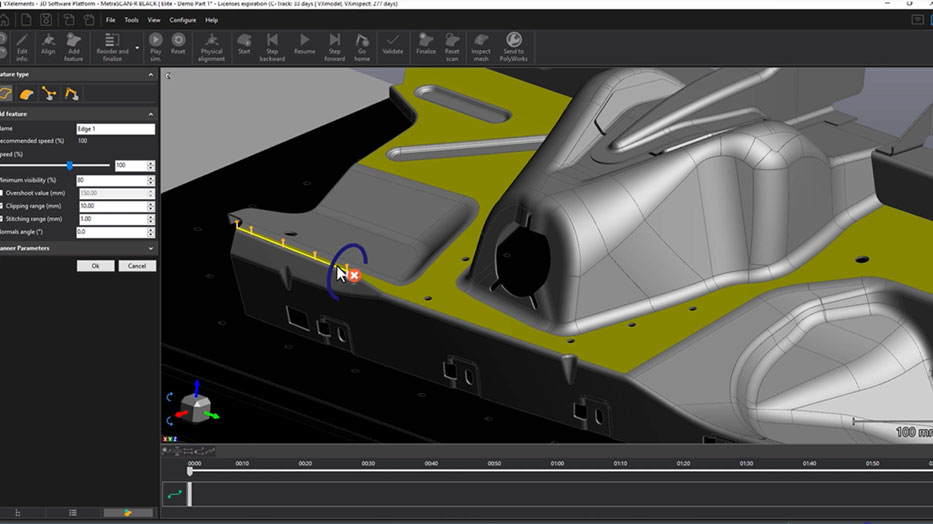
작업 1단계 : 로봇 프로그래밍
- CAD 모델을 사용하여 표면 검사를 위한 최적의 센서 위치를 생성합니다. 사용자가 자동 경로 생성을 위해 CAD 모델에서 표면, 모서리 또는 점을 선택하거나 조그 기능을 사용하여 로봇 경로를 수동으로 프로그래밍하는 동안 VXscan-R이 특이점을 감지하고 충돌을 피합니다.
- - CAD 얼라인먼트
- - 표면, 모서리, 점 선택을 통한 파라메트릭 프로그래밍
- - 조그 기능
VXscan-R
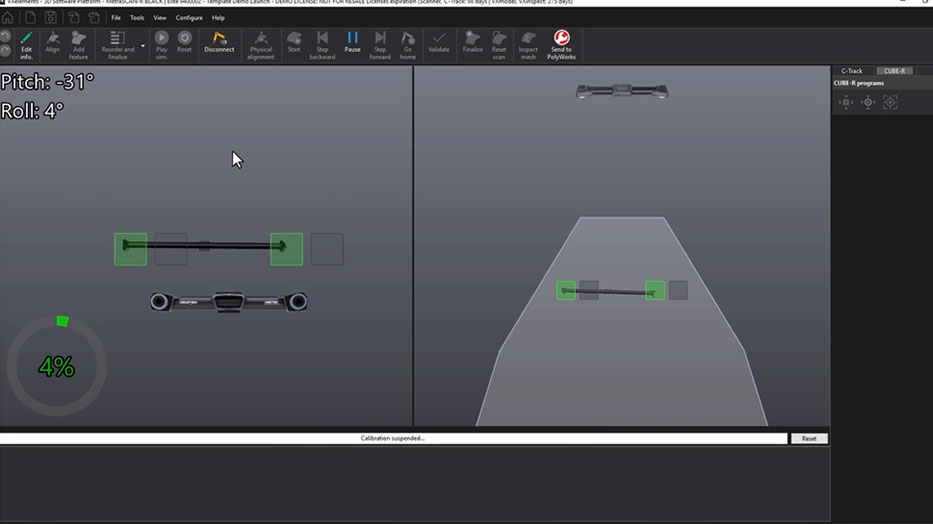
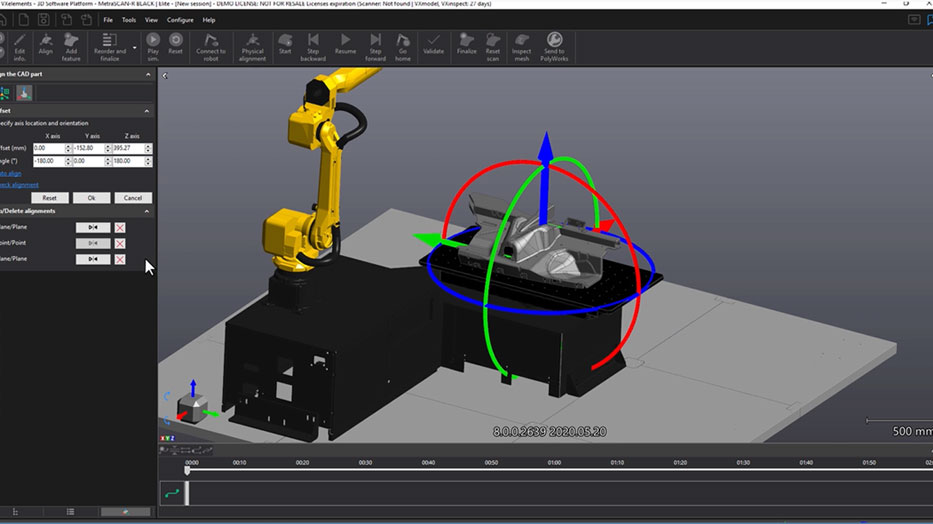
작업 2단계 : 시뮬레이션 + 검증
- 사실적인 시뮬레이션을 사용하여 스캐너의 특성에 최적화되고 충돌과 특이점이 없는 로봇 경로를 생성합니다.
- - 스캔 시뮬레이션
- - 로봇에 연결
- - 충돌 감지 및 회피
- - 프로그램 실행
.jpg)
.jpg)
VXscan-R
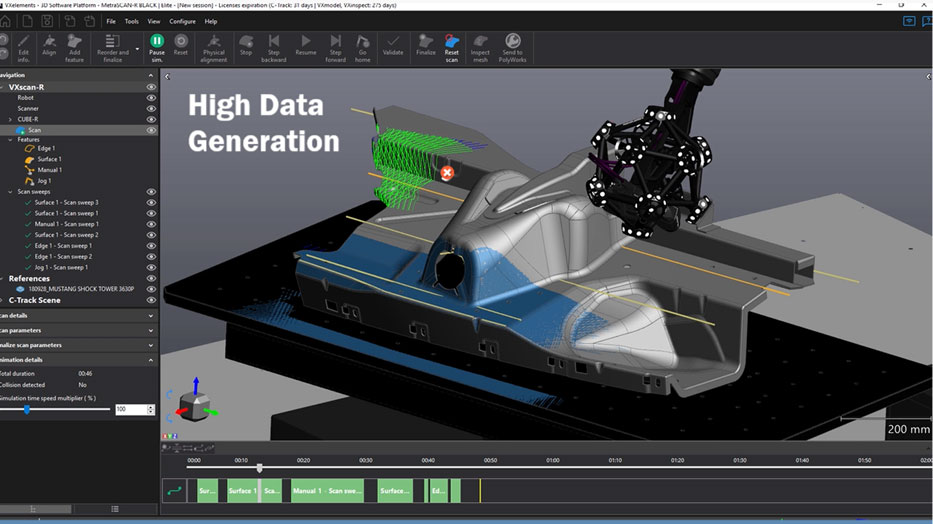
작업 3단계 : 측정
- 현장 작업자가 부품을 측정할 때 작업 실행을 안내합니다.
- - 자동 사진 측량
- - 자동 메쉬 생성을 이용한 3D 스캐닝
- - 스마트 해상도 기능
- - 프로그램 일시 중지 및 재개
VXscan-R
작업 4단계 : 검사 소프트웨어로 전송
- 표준화에 완벽한 VXscan-R은 상용되는 주요 검사 소프트웨어와 호환됩니다.
- - VXinspect
- - Polyworks
- - Metrolog X4
.jpg)
갤러리
|
||||||||||||||||||||||||||||||||||||||||||||||